
Built around November 2023
The Fan Car was inspired by unlimited Tamiya Mini-4WD cars I saw on YouTube, some of which use 8520 coreless motors and small drone propellers for propulsion. I built this simple RC car to experiment with using propellers, and these motors are quite inexpensive. I had initially planned to use additional fans to provide downforce through ground effect, but as yet haven’t implemented that.
While building the fan car I had the idea to make really efficient wheels using rubber O-rings as tyres. Another benefit of this design, is that it’s really easy to find the specific O-ring you want, whereas finding specific RC tyres consistently has been difficult for me before.
The wheels have a cylindrical groove around them which receives a 26x3mm rubber O-ring. This provides plenty of grip in this situation, as none of the wheels are driven.
Each wheel originally accepted two 8x3x3mm ball bearings, meaning they spin very freely. Later this was replaced with a 2mm bearing and bolt in order to reduce the weight further after the addition of the body.
These wheels were inspired by the tyres you might find on a road bicycle, which are very thin, with a small contact patch and low rolling resistance.
The tyres handle really nicely on a hard smooth surface like laminate. The handling is quite predictable, and when you turn hard off the power, you can hear the tyres scrub, and it will oversteer slightly.
The above video shows an early test with no propulsion, just pushing the car around the floor, you can see that it is quite agile, and has plenty of grip.
I 3D printed most of the car. The chassis is very simple, it has solid mounts for the rear wheels, which just take an M3 bolt to hold them on. The dimensions of the car are based on the WLToys K989, from which it borrows a wheelbase and track width – I really like these cars, and think they’re a good scale for my use.
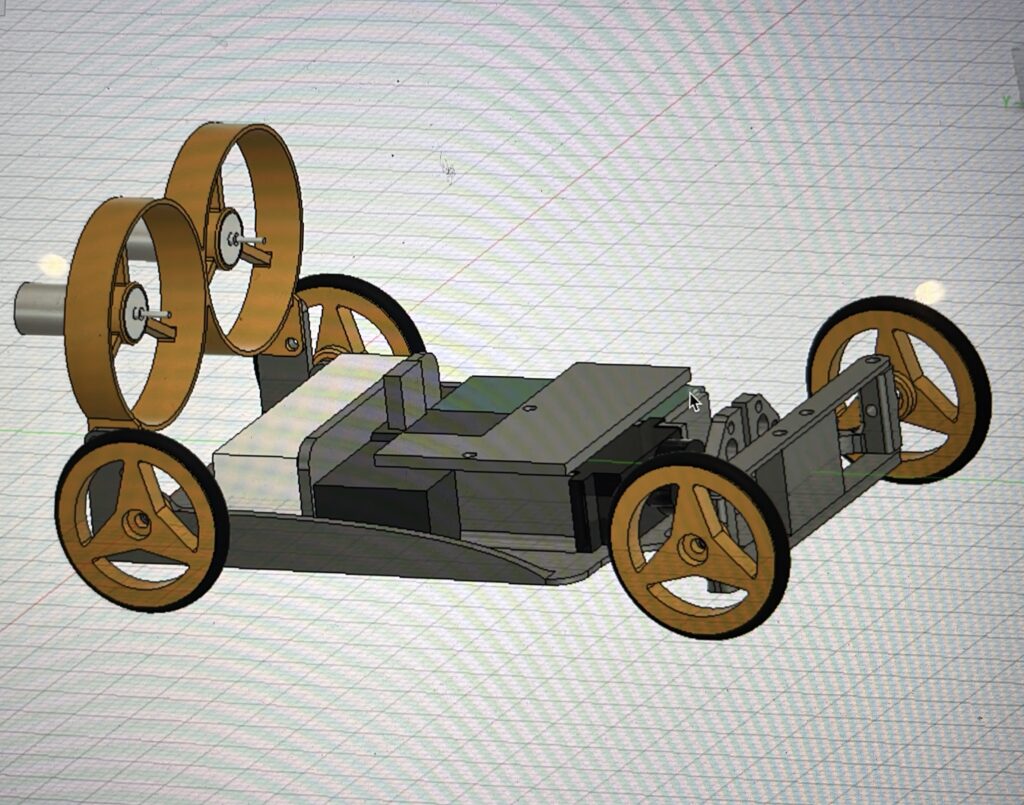
The front end of the car is designed to be as simple as possible to 3D print, and uses no ball joints or shock absorbers. The crossmembers of the front end act as leaf springs, each of them is printed a millimetre thick meaning they have a degree of natural give in them. The steering uses a design similar to a scotch yoke. This is simple to make but the steering will not be linear, and will be faster in the centre of it’s travel to the extremes.
The geometry is all square – no camber, caster etc.
I went through a few iterations of the chassis in order to dial in the strength and weight. I made some fairly considerable savings by strategically cutting holes in the chassis, thinning the floor to 1mm, etc.

For controls, I used a DumboRC X6F receiver – this is 6 channels with no gyro, not really necessary – although I did think potentially I would use other channels for remotely adjustable aero, but I have yet to develop this. I used a generic DC motor ESC, that is capable of differential thrust, however in this instance, both motors rotate together on a single output.
I am using a 2s battery I took from a WLToys RC car.
I am using an SG90 servo for the steering. This works fine. The car is probably light enough that you could use a lightweight linear servo for a RC plane, but I haven’t tried, and it would probably at best save <7g.
I am using a pair of generic 8520 motors in parallel, and driven by a single output of the ESC – torque vectoring would be a nice feature that would be quite trivial to add. They seem to work quite well. I don’t actually know if they are rated to work with 2s – I think they might be made for 5v, but as yet I haven’t had any problems with heat, and I haven’t broken any motors or ESCs yet.
Another thing that might be useful would be if an axis on the receiver was set up to adjust the angle of the propellers, via a servo, allowing you to increase the downforce at a cost of some thrust.
One problem I did run into is that the reciever/ESC don’t do any kind of automatic shutoff, so it’s quite easy to ruin batteries. I did install a battery alarm, but it was incredibly loud and shrill.
Overall, the car drives really well. It accelerates really fast. The total weight without a body was below 90g, and a crude thrust test using scales suggested the two motors with 35mm three blade drone props were producing around 90g of thrust. The body pushed the weight up to just over 100g, which didn’t have a drastic negative effect on the performance. Being “zero wheel drive” means that the car handles well on smooth surfaces, despite tiny contact patches.
The biggest downside I have found with this design is that you need to be on a very smooth surface for the vehicle to remain controllable. Laminate flooring or thin carpet work well, but anything with any kind of cracks or bumps will cause you to lose control as the crude leafspring suspension is unable to damp it enough. Patio or block paved surfaces are too rough, and even concrete can be a bit troublesome. As a result of this, I have started work on a second version, which will use a modified WLToys chassis, giving double wishbone suspension.
Some strange side effects of the propellers are that the car will continue to accelerate with the wheels off the ground – if you roll the car, the propellers are still able to move it, and also, the car will coast for a long time, and you have to spin the propellers backwards to slow down, which is relatively effective. Both of these side effects are quite obvious, but feel quite weird compared to a traditional RC car.